La fonction sustentation du drone
Les composants utilisés pour la sustentation du drone
Les moteurs
Quatre moteurs brushless sont nécessaires pour le drone quadrirotor. Il en existent de différentes taille et puissance. Ils sont caractérisés par le diamètre de leur cage tournante et par le nombre de tours/volt ou KV. Un moteur ayant un KV de 1000 tr/V fonctionnera à 12000 tours/min s’il est alimenté en 12V.

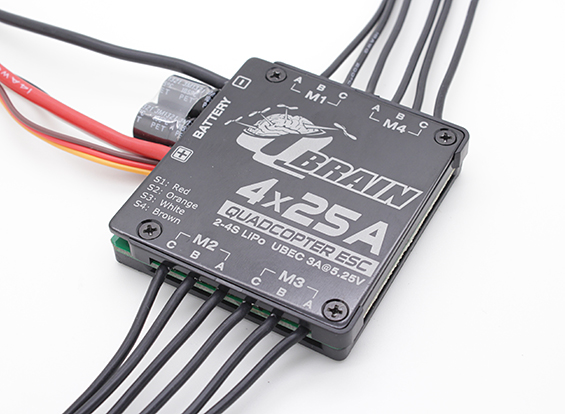
Les contrôleurs
Ces moteurs sont commandés par des interfaces de puissance appelées « Contrôleurs ». Ce sont des circuits électroniques qui permettent de faire varier la vitesse de rotation des moteurs, à partir du courant délivré par la batterie. La commande de vitesse vient du contrôleur de vol.
Les hélices
Elles sont souvent en matière plastique mais aussi parfois en matériaux composites. Elles sont identifiées par leur diamètre et leur pas indiqués en pouces (ex : 9×4,5). Sur un drone quadrirotor, il faut 2 hélices à sens horaires et 2 hélices à sens anti-horaire.

La batterie
Les batteries utilisées sur un drone multirotor sont essentiellement des « Lithium Polymère ». Elles sont issues d’une technologie qui permet d’avoir un très bon rapport poids/puissance. Un élément LiPo (1S) fournit une tension de 3,7V. Sur un drone, on utilise en général des batteries à 3 ou 4 éléments (3S ou 4S).
L’intensité est aussi un critère de choix. Une batterie de 3000mAH aura une meilleure autonomie qu’une batterie de 2200mAH.
Un chargeur spécifique est à prévoir ainsi que des règles de sécurité très strictes car ces batteries peuvent exploser en cas de mauvaise manipulation.